Build Logs
Documentation of iterative failures, hardware tuning, and material science discoveries observed during the assembly of the Dropbear Humanoid platform.
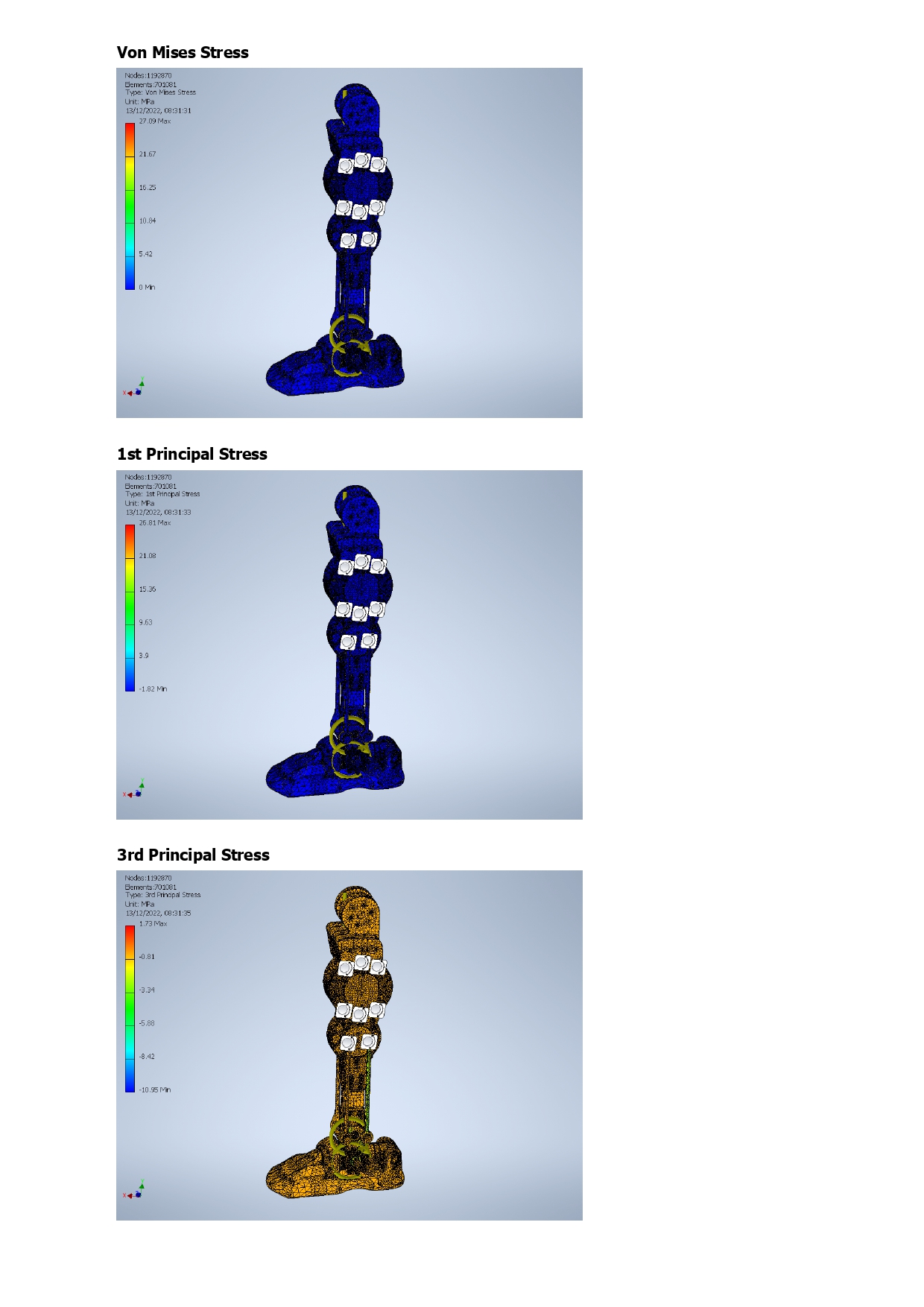
Lower Body Assembly: Carbon Fiber Infill Considerations
Oct 08, 2024Spent the last two weeks finalizing the lower body and the foot contact assemblies using the Bambu P1S. Transitioning from standard PETG to Carbon Fiber Nylon (PA6-CF) for the structural components completely neutralized the flex I noticed in earlier revisions. \n\nWe printed the shin shells and foot base at a 40% adaptive cubic infill. Warning for future builders: dry the PA6-CF furiously—at least 12 hours at 80C. The slightest moisture causes stringing across the tight joint tolerances. Sourced some 608ZZ bearings exactly to spec. They pressed into the foot chassis seamlessly.
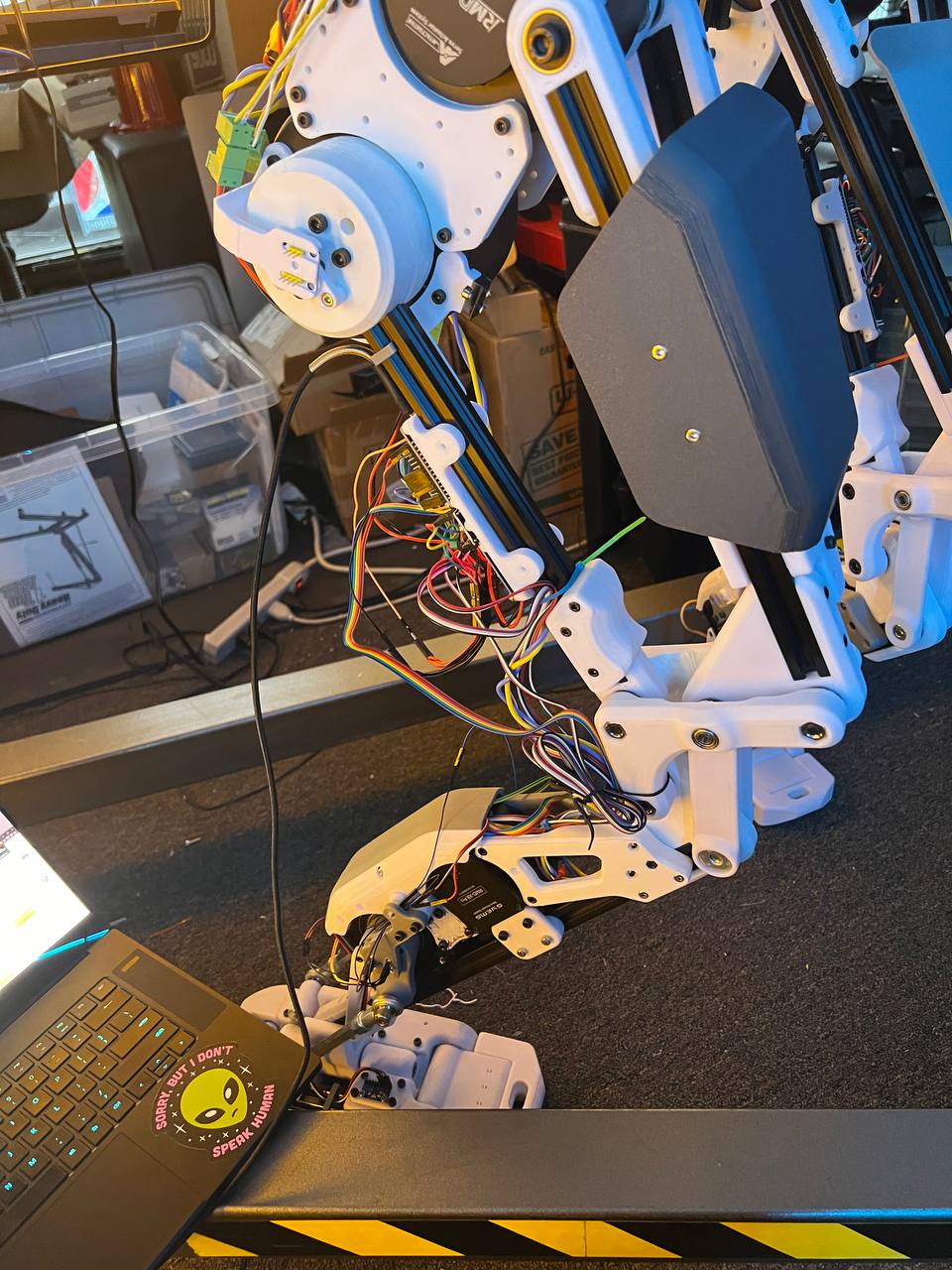
Control Loop Friction: VESC Tuning the QDD-100s
June 06, 2024Encountered heavy stuttering when closing the loop on the knees. Initially suspected mechanical binding, but isolating the actuator proved the openqdd-hs motor was fine. The issue lay in the PID tuning loop within the VESC configuration.\n\nThe Dropbear's knee geometry introduces a non-linear load profile as it bends. I had to manually smooth the current filtering and lower the P-gain on position control while relying more heavily on feed-forward torque calculations sent directly via CAN bus. Attached the testbench traces. Once tuned, the joint moves silently.
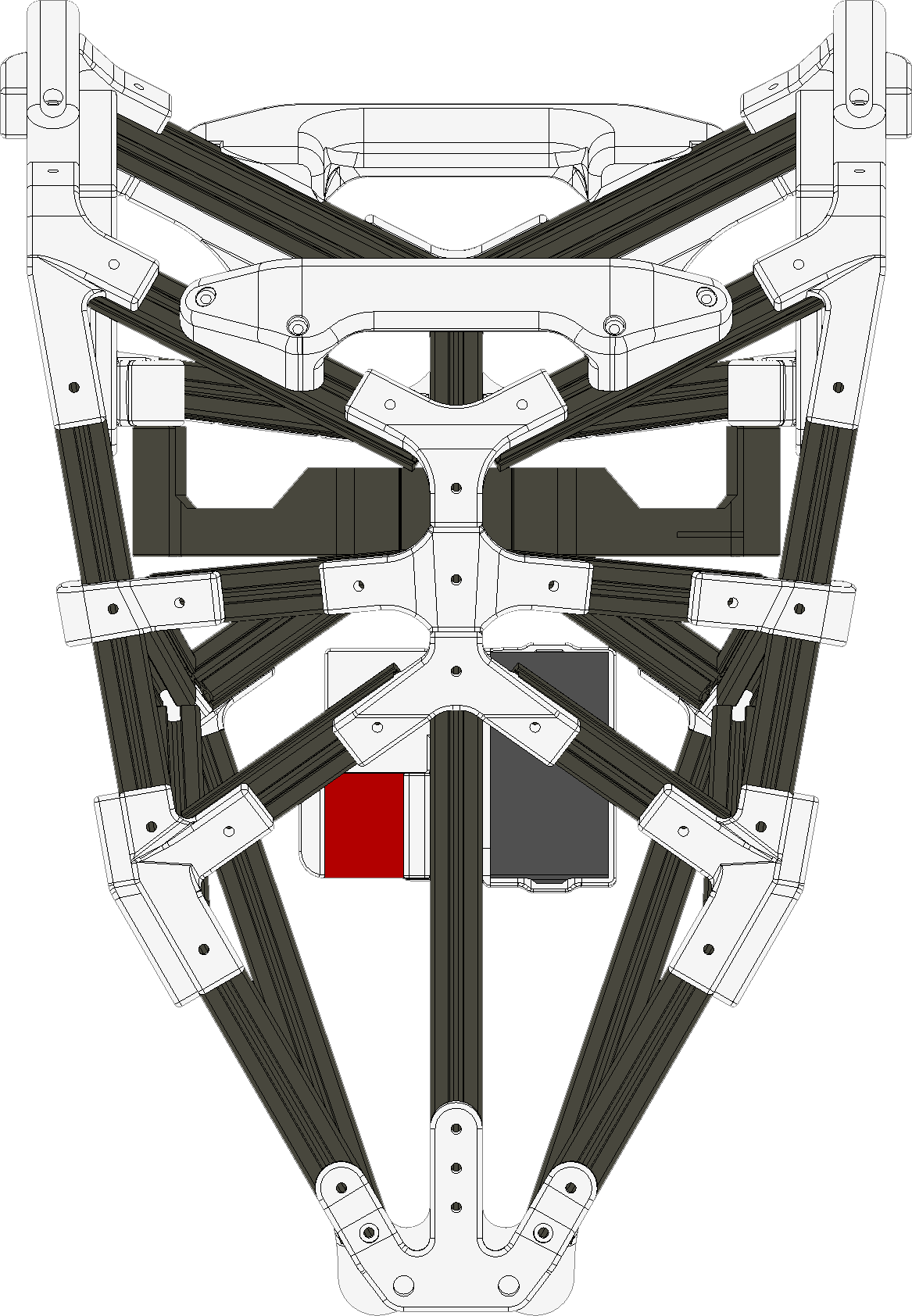
Torso Structural Integrity
August 19, 2023Wiring routing is beginning to get extremely tight around the central spine column where the torso connects to the hip gimbal. The 6S 5000mAh LiPo barely clears the internal retaining bracket. I'll need to redesign the internal bracket to allow for a slightly wider clearance. Cable management is critical here, as any chafing against the moving gimbal could be disastrous.\n\nThe overall silhouette is coming together. Modifying the dropbear_hardware repo to push an update for the backplate soon.